天津德鲁斯工业自动化设备有限公司
地址:天津市武清区南蔡金博产业园
电话:022-59624551 58510217 58510218
传真:022-29417768
电子邮箱:info@declous.com
网址:www.declous.com.cn
沈阳分公司代表处:
地址:沈阳市于洪区沈胡路55-3号17门
电话:024-31567901 31567902 31567903
传真:024-25993365
电子邮箱:info@declous.com
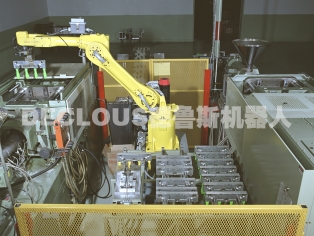
上下料机器人多数机床上下料系统运用于“地装式机器人搬运”,也称“岛式加工单元”,该系统以六轴机器人为中心岛,机床在其周围作环状布置,进行设备件的工件转送。集高效生产、稳定运行、节约空间等优势于一体,适合于狭窄空间场合的作业,高刚性的手臂和最先进的伺服技术保证高速作业时运动平稳无振动。利用视觉可实现工件的快速识别与高速取放。
机器人配置了7轴地装导轨,利用行走导轨来进行工件的转送,运行速度快,有效负载大,有效地扩大了机器人的动作范围,使得该系统具有高效的扩展性。
上下料机器人视觉控制系统主要由图像采集卡、镜头、工业相机、机器人、于东控制单元、计算机一级图像处理软件组成。工业相机通过1394接口与图像采集卡相连,图像采集卡通过代1插槽与计算机相连。首先,对摄像机进行标定确定图像坐标与实,际坐标之间的关系矩阵,该关系矩阵将作为编制视觉控制软件的参数用于计算图像点对应的空间坐标。其次,确定光源的打光方式,机器视觉系统中最关键的一个方面就是选择正确的照明,机器视觉光源直接影响到图像的质量,进而影响到系统的性能。其次确定图像处理的方案,对图像进行图像增强、图像分割并进行图像匹配,确定目标的图像坐标,根据图像坐标和关系矩阵求出目标的空间坐标最后,将空间坐标通过串口传送至机器人,机器人接收到信息并执行动作实现上下料。